Percepción del espacio
Nuestra visión cotidiana está claramente configurada en tres dimensiones. El espacio visual tiene altura, anchura y profundidad.
La forma de abordar el procesamiento de la profundidad consiste en buscar en la escena bidimensional las claves, indicadores o indicios que permiten alcanzar una representación tridimensional.
Las claves de profundidad
Claves monoculares
Claves estáticas
Pueden ser de dos tipos: oculares y pictóricas.
A) Claves oculares.
Acomodación. Es un cambio en la forma del cristalino necesario para mantener la imagen del objeto focalizada sobre la retina.
Cuando el objeto se encuentra alejado del observador el cristalino tiende a disminuir el grosor y a hacerse más plano. Sin embargo, cuando un objeto se aproxima al observador, los rayos procedentes del mismo divergen a medida que se acercan al ojo.
En este caso el cristalino aumenta su convexidad aumentando de grosor y de esta forma del cristalino se lleva a cabo mediante la acción de los músculos ciliares cuya contracción provoca el aumento de grosor y cuya relajación lo disminuye.
Las investigaciones sobre el valor de la acomodación como indicador de distancia han mostrado que solamente es efectivo en distancias cortas, inferiores a los 2,5 metros.
El sistema visual calcula el tamaño de los objetos tomando en cuenta la información proporcionada por la acomodación.
Proporciona información sobre la distancia absoluta a la que se encuentra un objeto. La mayor parte de los indicadores monoculares de profundidad proporcionan información sobre la distancia relativa de los objetos señalándonos cual de dos o más objetos se encuentran más próximos a nosotros pero no nos informan de la distancia a la que esos objetos están de nosotros.
El conocimiento de la distancia absoluta a la que se encuentran los objetos es necesario para poder alcanzarlos con precisión y para moverse en su entorno sin tropezar con ellos.
B) Claves pictóricas.
Perspectiva lineal . En el estudio de la percepción visual, el término perspectiva lineal hace referencia a las relaciones existentes dentro de la escena visual que subyacen a ese conjunto de reglas y también en parte a la percepción de la distribución espacial.
Una de las reglas más básicas de la perspectiva lineal es la convergencia de paralelas según la cual las líneas paralelas en el espacio tridimensional se presentan en dos dimensiones por líneas que convergen hacia un único punto llamado punto de fuga. El punto de fuga está situado en la línea del horizonte de la superficie que sirve de punto de referencia para dividir el espacio visual en dos zonas, una superior y otra inferior. La línea del horizonte de una superficie es la línea que pasa por dos o más puntos de fuga de conjuntos de líneas paralelas que se extienden en la superficie.
La convergencia de paralelas propia de la perspectiva lineal nos permite entender la relación entre el puto de fuga y la orientación de los bordes de una superficie. Si se mide la orientación de un borde por referencia a un marco fijo del medio ambiente, entonces todos los bordes que tienen la misma orientación son paralelos ente sí y la proyección es un conjunto de líneas que convergen en un único punto de fuga. El punto de fuga de un borde puede concebirse como el término final de la proyección de un borde cuando se extiende infinitamente en la distancia.
Para casa orientación determinada de un borde existe un correspondiente punto de fuga y cada punto en el plano de proyección es el punto de fuga de un conjunto de bordes paralelos que tienen la misma orientación.
Esta relación entre punto de fuga y orientación de los bordes no varía aunque cambie el punto de observación; cada punto de fuga permanece fijo en su posición de correspondencia con las orientaciones fijas de los bordes en el medio ambiente.
Altura relativa . Generalmente aquellos objetos que se encuentran próximos a la línea del horizonte de una superficie bidimensional son percibidos como más lejanos. La potencia de la altura relativa como clave de profundidad o de distancia depende de la presencia de un marco de referencia que es la línea del horizonte. El efecto de profundidad se acentúa por la presencia de textura dentro del marco de referencia. En ausencia de un marco de referencia, el efecto de profundidad queda prácticamente anulado.
Perspectiva aérea . Hace referencia a los cambios en contraste y en color que experimenta la percepción de los objetos cuando se encuentran a gran distancia del observador. El contraste tiende a reducirse haciendo que la imagen de los objetos aparezca más borrosa debido a la dispersión de la luz, la lejanía de los objetos tiende a acentuar las tonalidades azuladas debidas también a que las longitudes de onda cortas son más fácilmente perturbadas por las partículas suspendidas en la atmósfera que las longitudes de onda largas.
Tamaño relativo . Si dos objetos son presentados en el campo visual simultáneamente o en próxima sucesión, aquel que produce una imagen retiniana mayor, parecerá estar más cerca.
Tamaño familiar . Experimentos que han utilizado objetos familiares para los participantes han puesto de manifiesto que si se conoce el tamaño real de un objeto, el tamaño de la imagen proyectada sobre el observador es un buen indicador de la distancia a la que se encuentra el objeto. El tamaño familiar es un ejemplo claro de la influencia que la experiencia puede tener sobre los procesos de percepción.
Gradiente de textura. Casi todas las superficies tienen una estructura que consta de unidades o elementos, relativamente homogéneos en tamaño y forma, distribuidos por la superficie con relativa regularidad. A la cualidad producida por este tipo de estructura se le da el nombre de textura. Por otra parte, podemos definir el término gradiente como la proporción en que una determinada propiedad cambia a los largo de un continuo. El gradiente de textura hace referencia al cambio gradual que la percepción de la textura de una superficie experimenta a medida que ésta se encuentra más alejada del observador.
Además de informar sobre la profundidad, el gradiente de textura también puede proporcionar información sobre otras características de la superficie, como su orientación en profundidad o su curvatura.
James Gibson , que formuló la aproximación ecológica al estudio de la percepción , consideró que el gradiente de densidad de textura es uno de los aspecto de la estimulación que mayor información proporciona una escala absoluta de distancia respecto a la que se puede medir toda otra distancia.
Sombreado y sombras . El término sombreado hace referencia a los cambios en el patrón de iluminancia que se produce como consecuencia de la variación en el ángulo que forman la luz que incide sobre una superficie y la superficie misma. Existen diferentes tipos de sombreado: - El sombreado especular : es el propio de superficies brillantes como un espejo y depende fundamentalmente de la posición del observador y de la dirección de la iluminación.
- El sombreado difuso o Lambertiano : es el propio de las superficies mate cuya reflectancia es igual en todas las direcciones. La cantidad de luz reflejada por cada punto de la superficie depende de su orientación respecto a la fuente de luz, siendo máxima en los puntos en que la luz incide perpendicularmente sobre la superficie. Por ello, cuando superficies de la misma reflectancia presentan ángulos diferentes respecto a la misma fuente de iluminación, pueden dar a lugar a bordes de iluminación.
El sombreado es un potente indicador de los aspectos volumétricos de las formas, en particular sus concavidades y convexidades.
Los objetos circulares iluminados en su parte superior y obscurecidos en su inferior son percibidos como convexos. En los oscurecidos en su parte superior e iluminados en su inferior son percibidos como una oquedad. Ramachandran ha puesto de manifiesto que el supuesto que parece realmente enraizado en nuestro sistema visual es el de la existencia de una sola fuente de luz. Nuestro sistema visual prefiere ver caras normales convexas aunque para ello tenga que asumir que la luz viene de abajo.
Una sombra es una zona de la escena a la que no llega la iluminación pro haber sido ésta bloqueada. La forma de la sombra depende de varios factores:
- La proximidad de la fuente de iluminación.
- Su dirección.
- La forma del objeto que proyecta la forma.
- El relieve de la superficie sobre la que es proyectada.
- La posición relativa entre la fuente, el objeto y la superficie.
La sombra puede estar unida al objeto o separada del mismo. Las sombras unidas al objeto indican que el objeto está apoyado sobre la superficie.
Interposición . Los objetos que se encuentran más alejados pueden quedar total o parcialmente ocultos a un observador por la presencia de otros objetos interpuestos en la línea de visión.
Cuando un objeto aparece parcialmente encubierto, nuestro sistema visual tiende a percibir como más alejado al objeto tapado y como más cercano al objeto impuesto. Es uno de los indicadores más potentes de profundidad aunque se limita a proporcionarnos información ordinal sobre la distancia de los objetos en relación al observador. La interposición no nos informa de la magnitud de las distancias entre los objetos y el observador.
Claves dinámicas
Paralaje de movimiento.
Cuando un observador se mueve en dirección lateral con respecto a su campo de visión, los objetos que se encuentran a distancias diferentes proyectan unas imágenes en la retina que se mueven en sentido y a velocidades diferentes. Podemos definir el paralaje de movimiento como el desplazamiento diferencial de las imágenes, proyectadas por distintos objetos, debido a un cambio lateral en la posición del observador y a la distancia relativa de los objetos con respecto al punto de fijación.
Los objetos más cercanos parecen desplazarse más lejos y a mayor velocidad mientras que para los más alejados el desplazamiento es menor y más lento. Sin embargo, el sentido del movimiento no depende únicamente de la distancia a la que se encuentran los objetos sino también de la posición del punto de fijación. Los objetos que están situados en una posición más cercana al observador que aquella en la que cae el punto de fijación, se mueven en sentido contrario al observador, mientras que los situados en una posición más alejada que el punto de fijación se mueven en el mismo sentido que el observador.
El paralaje de movimiento es una clave de profundidad muy efectiva a grandes distancias incluso cuando no están presentes otras claves de profundidad.
Flujo óptico.
Para la clave de paralaje de movimiento, el sentido del movimiento para todos los puntos que se encuentran por delante del punto de fijación es contrario al sentido del movimiento del observador, mientras que el de los puntos que se sitúan por detrás del punto de fijación es igual que el del observador.
La velocidad se va haciendo menor a medida que las direcciones se aproximan al punto de fijación y aumentan a medida que se alejan del mismo.
Al acerarse a una superficie u objeto, se produce un fenómenos de expansión óptica consistente en que el punto de fijación permanece estático en la fóvea mientras que el resto de puntos en el campo visual divergen hacia su exterior en todas las direcciones a partir del punto de fijación y a una velocidad que es tanto mayor cuanto más alejados están del punto de fijación. Cuando la velocidad de expansión es alta, el patrón de expansión produce la impresión de que la superficie se echa encima del observador. Cuando el movimiento consiste en alejarse de un punto de referencia, el patrón que se produce es de contracción óptica en el que los puntos del campo visual tienden a converger hacia el punto de fijación.
El efecto de profundidad cinética.
También los cambios en el patrón de estimulación producido por el movimiento de otro objeto pueden proporcionar información sobre la profundidad. El efecto de profundidad cinética de Wallach y O ́Connell mostraron que la fuente de iluminación L proyecta sobre la pantalla P la sombra del objeto en forma de T.
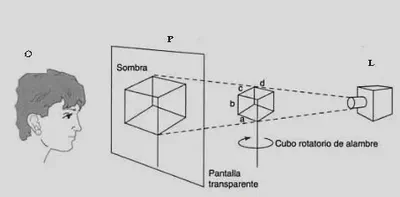
El observador O, situado por delante de la pantalla, sólo es estimulado por la sombra del objeto y sus transformaciones bidimensionales al rotar.
Este efecto demuestra que el sistema visual es capaz de recuperar la forma y el movimiento en profundidad de los objetos a partir de los cambios en longitud y en orientación de formas bidimensionales.
Las claves binoculares
Son aquellas que proporcionan información sobre la distancia combinando información procedente de cada uno de los ojos.
Convergencia binocular
Cuando fijamos la vista en un objeto, las líneas de visión de cada uno de los ojos convergen en el punto de fijación. Al ángulo formado por estas líneas con vértice en el punto de fijación se le llama ángulo de convergencia. Su tamaño varía en función de la distancia a la que se encuentra el punto de fijación. Si el objeto se aproxima a nosotros, el ángulo de convergencia tiende a hacerse mayor, y si el objeto se aleja, el ángulo de convergencia tiende a disminuir.
La convergencia binocular es una clave fisiológica porque el tipo de información que proporciona se refiere a los ajustes oculomotores que controlan la posición de los ojos.
El ángulo de convergencia puede ser utilizado por el sistema visual para determinar la distancia al punto de fijación. El sistema visual utiliza esa información, pero solamente para distancias cortas porque la variación en el ángulo de convergencia sólo tiene lugar en distancias no superiores a uno o dos metros. Más allá de los 3 metros de distancia la posición de los ojos no cambia por mucho que el objeto se aleje.
Normalmente la convergencia binocular actúa conjuntamente con la acomodación. A medida que un objeto se aleja, tanto la convergencia como la acomodación varían.
Al parecer, la información proporcionada por la acomodación del cristalino del ojo no tapado es suficiente para guiar al mecanismo de convergencia. Tanto la convergencia como la acomodación son claves útiles en distancias cortas y además tienen el valor añadido de proporcionar información sobre la distancia absoluta a la que se encuentra un objeto, cosa que pocas claves de distancia proporcionan.
La estereotipia
Es una clave que nos proporciona información acerca de la distancia relativa de los objetos sobre la base del desplazamiento lateral que la proyección de un objeto experimenta en las retinas de los dos ojos.
Conceptos fundamentales
Los puntos de cada retina sobre los que cae una proyección se llaman puntos correspondientes porque, si superpusiéramos la retina de un ojo sobre la retina del otro, los puntos coincidirían. En general, un punto “a” en retina derecha y un punto “b” en la retina izquierda son puntos correspondientes cuando ambos tienen la misma posición en su respectiva retina.
Cada punto de una retina su correspondiente punto en la otra. La estimulación de puntos correspondientes en las dos retinas provoca fusión binocular puesto que el objeto es visto como un único objeto.
Horópter: conjunto de puntos en el espacio visual que, cada una determinada fijación ocular, proyectan su imagen en puntos correspondientes de las dos retinas. Se define en relación al punto y por lo tanto cambia cuando cambia el punto de fijación.
Suponiendo que los ojos fueran esferas perfectas y que rotan en torno a ejes que solamente pasan por el punto nodal de cada ojo(*), el horópter longitudinal, que se define en el plano horizontal, está constituido por una circunferencia que pasa por el punto de fijación y por el punto nodal de cada ojo. Esta circunferencia suele conocerse como circunferencia de Vieth-Müller. En el plano vertical, el horópter vertical está definido por la recta perpendicular al plano de visión.
(*) El punto nodal es el punto en que el rayo principal de luz proveniente de un objeto corta al eje óptico.
El horópter vertical tiende a estar inclinado en la dirección de la línea de visión, alejándose del observador por encima del punto de fijación y acercándose a él por debajo del punto de fijación. El horópter longitudinal tiende a quedarse en una posición próxima a la circunferencia de Vieth-Müller.
Disparidad binocular: cuando un punto en el espacio visual no proyecta su imagen en puntos correspondientes de las dos retinas, las imágenes del objeto en cada uno de los dos ojos resultan tanto más diferentes cuanto mayor es el desplazamiento lateral de una proyección respecto de a otra. Este desplazamiento relativo de las dos proyecciones recibe el nombre de disparidad binocular.
La ligera diferencia entre la visión de la escena proporcionada por el ojo derecho y por el izquierdo está ocasionada por las distintas proyecciones que reciben debido a la separación existente entre ellos.
El fenómeno de la disparidad binocular es parecido al fenómeno de paralaje de movimiento. No obstante se diferencian en que el desplazamiento de la imagen en la disparidad binocular está fijado por la distancia interocular, mientras que en la clave de paralaje de movimiento el desplazamiento de la imagen depende de la amplitud del movimiento lateral que realice el observador. Además, en la disparidad binocular el desplazamiento de las imágenes es simultáneo mientras que en la clave de paralaje de movimiento el desplazamiento de las imágenes es sucesivo.
La disparidad binocular puede proporcionarnos información respecto a la posición de los objetos en el espacio tridimensional.
El sentido de la disparidad nos informa de la posición del objeto respecto al punto de fijación.
Tiene dos puntos nodales, pero como la distancia entre ellos es muy pequeña, son tratados como un solo punto.
En general, el desplazamiento de los objetos más próximos que el punto de fijación se produce en sentido contrario al desplazamiento de las imágenes producido por nuestro abrir y cerrar de ojos, y por ello se le da el nombre de disparidad cruzada. Por el contrario, los objetos más alejados, de nosotros que el punto de fijación se desplazan en el mismo sentido que el del desplazamiento de las imágenes y por ello la disparidad que producen se denomina no cruzada.
Finalmente, la magnitud del desplazamiento es un indicador cuantitativo de la distancia a la que se encuentra un objeto: a medida que un objeto se aleja del punto de fijación aproximándose al observador, su disparidad cruzada aumenta, y a medida que un objeto se aleja del punto de fijación alejándose también del observación, su disparidad no cruzada aumenta.
El aumento de la disparidad cruzada está asociado con una aproximación del objeto al observador y el aumento de la disparidad cruzada está asociado con un alejamiento del objeto respecto al observador. Y, a la inversa, la disminución de la disparidad cruzada está asociada con un alejamiento del objeto respecto al observador mientras que la disminución de la disparidad no cruzada está asociada con un acercamiento del objeto al observador.
Puede producir estereoscopia o puede producir imágenes dobles que ponen en macha un proceso de rivalidad binocular. Cuando la disparidad es pequeña, las imágenes de los dos ojos se fusionan en una sola pero situada a una distancia del observador diferente de la distancia que corresponde al horópter. Esta diferencia en profundidad es lo que se denomina estereoscopia.
Podemos definir estereoscopia como la percepción de la profundidad producida por la disparidad binocular. Dependiendo de la dirección de la disparidad los objetos aparecen por delante o por detrás del horópter longitudinal. La disparidad cruzada produce la percepción del objeto por delante del horópter mientras que la disparidad no cruzada produce la percepción del objeto por detrás del horópter.
Procedimientos estereoscópicos.
Los estereogramas son pares de imágenes prácticamente iguales pero que difieren en el desplazamiento lateral de sus elementos. Cada imagen del par recibe el nombre de media-imagen. Cuando cada media-imagen estimular un ojo diferente al mismo tiempo, la imagen fusionada produce una sensación de profundidad.
Si cada media-imagen es presentada simultáneamente a un ojo diferente, se producirá la segregación de la imagen fusionada en tres planos diferentes de profundidad.
Hasta los años 60, se pensaba que la percepción estereoscópica de la profundidad era la consecuencia de la disparidad retiniana del contorno y de los bordes de cada media-imagen.
El problema de la correspondencia.
Determinar qué puntos o partes de la imagen de un ojo corresponden a qué puntos o partes de la imagen del otro ojo. Este es el llamado problema de la correspondencia.
La gran revolución es el estudio de la estereoscopia se produjo cuando
Bela Julesz demostró que se podía producir estereoscopia utilizando estereogramas de puntos aleatorios.
Estereogramas de puntos aleatorios.
Consisten una pareja de medias-imágenes, cada una de las cuales consiste en miles de puntos colocados aleatoriamente, cuyo desplazamiento lateral produce una fuere sensación de profundidad cuando las dos medias-imágenes se ven estereoscópicamente.
Los estereogramas de puntos aleatorios demostraron que la forma y los bordes de la imagen monocular no son necesarios para guiar la resolución del problema de la correspondencia. Es suficiente una mera disparidad de puntos para que se produzca la segregación de una imagen o de una escena en diferentes planos de profundidad. Estos estereogramas también ponen de manifiesto que la estereoscopia no es un resultado tardío en el procesamiento de información visual, que necesite un procesamiento previo de la forma de las imágenes monoculares. Más bien, la estereoscopia aparece como un proceso que tiene lugar relativamente pronto y que incluso proporciona información sobre la forma de los objetos.
Características de la estereoscopia humana
Bajo las mejores condiciones perceptivas, la agudeza estereoscópica se encuentra en el rango de los 2 a los 6 segundos de ángulo. También se ha encontrado que la sensibilidad es mayor para la disparidad cruzada que para la no cruzada. La sensibilidad estereoscópica depende de factores espaciales tales como la excentricidad de los estímulos y la distancia entre los estímulos y el punto de fijación. Para la excentricidad y la distancia, la sensibilidad disminuye cuando aumentan sus valores.
La magnitud de disparidad dentro de la cual se produce estereoscopia está limitada a un área en torno al horópter que se conoce con el nombre de área de fusión Panum. El tamaño de esta área es menor en el entorno del punto de fijación que en la periferia.
La interpretación clásica del área de Panum ha considerado que el área representaba propiedades fijas de una región determinada de la retina.
Hoy sabemos que esta concepción es errónea pues tanto el tamaño como la forma del área de Panum dependen tanto de las características del estímulo como del procedimiento utilizado para medirla.
Mecanismos fisiológicos de la estereoscopia.
Neuronas en la corteza visual primaria (V1) que respondía de forma selectiva a la disparidad binocular. Con posterioridad se han encontrado células selectivas a la disparidad en otras áreas de la corteza cerebral como V2 y V3. Estas neuronas muestran alta tasa de disparo cuando un determinado estímulo incide en puntos de las dos retinas que no son correspondientes. Unas células responden preferentemente a niveles de disparidad bajos, mientras que otras lo hacen a niveles de disparidad altos. Unas responden a la disparidad cruzada mientras que otras lo hacen a la no cruzada.
DeAngelis Cumming y Newsome descubrieron que en el área temporal medial (MT) existía una clara organización funcional de la estereotipia que presentaba tres características fundamentales:
- Las neuronas selectivas a la disparidad estaban organizadas en columnas de acuerdo con valores particulares de disparidad, las neuronas que mostraban preferencia para una determinada disparidad binocular formaban parte de la misma columna.
- Las neuronas selectivas a la disparidad estaban agrupadas a lo largo de MT formando como una especie de parches intercalados con otros que no mostraban selectividad a la disparidad.
- En los parches con buena selectividad a la disparidad, la disparidad preferida variaba de forma gradual y continua de columna a columna a lo largo de la superficie de MT.
Estos resultados indicaban que el área MT contenía un mapa de disparidad binocular. Las neuronas pertenecientes a este mapa estaban implicadas en la percepción de la profundidad y para ello estimularon eléctricamente grupos de neuronas mientras los monos realizaban una tarea de discriminación de la profundidad utilizando estereogramas de puntos aletarorios estáticos.
Los resultados mostraros que la microestimulación provocaba un sesgo sistemático en los juicios perceptivos de los monos en la dirección de la disparidad preferida por las neuronas que eran estimuladas. Parece claro que en el área MT se originan señales relevantes para la percepción de la profundidad estereoscópica.
Rivalidad binocular
La disparidad binocular, siempre que no sobrepase la magnitud indicada por el área de Panum, produce estereoscopia. Cuando la disparidad es grande y sobrepasa los valores de dicha área se producen imágenes dobles aunque por lo general la experiencia consciente de las dos imágenes, (diplopía) no llega a producirse. La razón de que no se produzca se debe a que las imágenes dobles provocan un fenómeno de rivalidad binocular en el que ambas imágenes parecen competir por acceder a la consciencia. Cuando los estímulos son pequeños, produciendo un ángulo visual igual o menos a un grado, la rivalidad es total de forma que una imagen domina sobre la otra durante un periodo de tiempo que oscila entre 1 y 4 segundos y durante ese periodo es la única imagen percibida conscientemente. Después la experiencia consciente cambia y la imagen que antes estaba suprimida accede a la consciencia y la que se percibía es suprimida.
Cuando los estímulos son grandes, la rivalidad binocular produce una imagen consciente compuesta de trozos o partes pertenecientes a cada una de las dos imágenes.
La visión binocular normal implica tanto estereoscopia como rivalidad binocular. La estereoscopia fusiona los puntos que se encuentran dentro del área de Panum y la rivalidad binocular resuelve la competición entre imágenes dobles.
Relación ente las claves de profundidad
La ausencia de una clave no es un obstáculo para que el sistema visual pueda obtener una adecuada adaptación a la situación estimular tridimensional.
Las distintas claves pueden relacionarse entre sí de tres formas diferentes: dominancia, compromiso e interacción.
Dominancia
Se produce dominancia de una clave sobre otra cuando el sistema visual ignora la información proporcionada por una clave a favor de la proporcionalidad por otra clave de profundidad. Un ejemplo conocido es la habitación de Ames. Se trata de una habitación distorsionada de forma trapezoidal, el observador sólo puede mirar dentro de la habitación a través de un orificio situado estratégicamente en una de las paredes de la habitación. Desde ese punto de vista, la habitación parece rectangular a pesar de que no lo es.
El tamaño de las personas queda determinado por el tamaño de la imagen proyectada en la retina.
Compromiso
No siempre se produce el predominio de una clave respecto de otra. A veces, la resultante del conflicto entre las informaciones proporcionadas por las distintas claves es un valor intermedio entre los valores de profundidad proporcionados por cada clave.
El grado de profundidad percibida era el resultado de sumar la información proporcionada por cada una de las claves.
Parece como si la información proporcionada por cada clave fuera independiente de la información proporcionada por las otras y el resultado final se produjera sin ningún tipo de interacción entre las claves.
Interacción
La investigación de integración entre claves de profundidad casi se ha limitado a constatar la existencia de los tres tipos de procesos.
Teorías de la percepción espacial
Dos aproximaciones teóricas han determinado la investigación sobre percepción espacial en psicología. Las dos aproximaciones han recibido nombres diferentes: aproximación constructivista y aproximación ecológica.
La aproximación constructivista
Suele considerarse a Helmholtz como padre de la primera formulación científica de la misma.
Una idea central de la aproximación constructivista es que la percepción tiene lugar por fases que se complementan unas a otras y que de forma conjunta contribuyen a proporcionar la información necesaria. Inicialmente, la información proporcionada por la imagen retiniana o estímulo próximo no es adecuada para determinar por sí sola la percepción. El estímulo próximo es ambiguo y necesita la aportación de información por parte de otros procesos psicológicos, tales como el aprendizaje y la memoria, para resolver esa ambigüedad y proporcionar una percepción adecuada al estímulo distante.
Las claves de profundidad actúan como un contexto interpretativo que nos permite recuperar las características tridimensionales del estímulo distante a partir del núcleo de información proporcionado por la imagen retiniana bidimensional.
La constancia del tamaño
El ángulo visual y por consiguiente el tamaño de la imagen retiniana, varía directamente con el tamaño del objeto e inversamente con la distancia a la que se encuentra el objeto. A igual distancia, cuanto mayor es un objeto mayor es el ángulo visual que su imagen proyecta en la retina. Por otra parte, el ángulo visual proyectado por un objeto disminuye a medida que el objeto se aleja del observador.
Constancia del tamaño: de alguna forma el sistema visual compensa la disminución del ángulo visual de forma que la consciencia visual del observador mantiene una experiencia constante del tamaño del objeto.
Tomar en consideración la distancia
Helmholtz fue el primero en postular que el sistema visual tomaba en consideración la distancia a la que se encontraba un objeto por medio de una inferencia inconsciente. Según Helmholtz, el sistema visual primero registra el tamaño de la imagen retiniana y después modifica esa información de acuerdo con la información disponible acerca de la distancia a la que se encuentra el objeto. Para Helmholtz esta operación tenía lugar de forma inconsciente, sin que el observador cayera en la cuenta de la misma.
La formulación moderna de esta misma idea se conoce con el nombre de hipótesis de la invarianza tamaño-distancia, que se limita a suponer que la imagen retiniana guarda la misma relación con el tamaño y la distancia percibidos que con el tamaño y la distancia físicos.
La hipótesis de la invarianza tamaño-distancia supone que la imagen retiniana guarda la misma relación con el tamaño percibido (hp) y la distancia percibida (dp) de modo que:
tan(α) = hp / dp
En una situación cotidiana, a medida que un objeto se aleja del observador, el ángulo visual producido por el objeto disminuye pero el tamaño percibido permanece constante debido a la relación expresada en la ecuación.
Evidencia a favor de la hipótesis de la invarianza tamaño-distancia
La ley de Emmert
Si el tamaño de la imagen retiniana permanece constante, entonces el tamaño percibido es proporcional a la distancia percibida. Todo cambio en la distancia a la que se encuentra un objeto conlleva un cambio en ángulo visual y por tanto en el tamaño de la imagen retiniana. Sin embargo existe un fenómeno perceptivo que permite mantener constante el tamaño de la imagen retiniana y cambiar la distancia a la que se percibe un objeto. Se trata del fenómeno de las posimágenes.
Esta experiencia ilustra la ley enunciada por Emmert que establece que el tamaño aparente de una posimagen es directamente proporcional a su distancia percibida desde el observador.
La ley de Emmert expresa un hecho que se refiere a la variación en tamaño percibido con el cambio de la distancia.
Si el sistema visual multiplica el tamaño retiniano por la distancia percibida para producir el tamaño percibido, entonces cuando el ángulo visual decrece al aumentar la distancia el producto resultará en la constancia del tamaño. Sin embargo, el tamaño aparente aumentará como indica la ley de Emmert para las posimágenes.
Percepción del tamaño e indicadores de profundidad
En la situación experimental ideada por Holway y Boeing, el observador estaba situado en la intersección de dos largos pasillos que se extendían en forma de L. En uno de los pasillos había un disco de luz que era ajustable en tamaño y que se colocaba a una distancia fija del observador. El observador tenía el control del tamaño de este disco. En el segundo pasillo se colocaba otro disco de referencia y, en cada ensayo, se variaba la distancia a la que era presentado. Su tamaño era elegido por el experimentador en cada ocasión de forma que el ángulo visual que proyectaba sobre la retina fuera siempre de un grado de ángulo visual.
La tarea del observador consistía en ajustar el tamaño del primer círculo hasta que le pareciese igual al círculo de referencia. Holway y Boeing estudiaron la ejecución de los sujetos bajo las siguientes condiciones de observación visual:
- a) Visión binocular normal.
- b) Visión monocular
- c) Utilizando una pantalla de reducción por la que el observador mira con un solo ojo.
- d) En una condición similar a c) pero eliminando aún más los posibles puntos de referencia.
En el experimento de Holway y Boeing el ángulo visual proyectado por el estímulo de referencia, y por tanto la imagen retiniana, se mantenía constante.
Bajo las condiciones de observación a) y b) el ajuste aparente, e incluso la condición a) tendía a exagerar ligeramente el ajuste.
En la condición c) el aumento del disco de ajuste, a medida que aumentaba la distancia del disco de referencia, era mucho menor que en las condiciones a) y b).
En la condición d), en la que la degradación de las claves de distancia era mayor, la tendencia presente en c) se acentuaba aún más y la función se aproximaba a la constancia típica de una situación en la que el único indicio disponible para el observador era el ángulo visual.
Otros experimentos han mostrado también que, a la hora de juzgar el tamaño de los objetos, las personas pueden tomar en consideración varios factores diferentes. Por ejemplo, se ha puesto de manifiesta que las instrucciones respecto al punto de referencia que el observador debe adoptar par emitir sus juicios, pueden influir en la percepción del tamaño.
Gilinsky realizó un experimento en el que presentó a los participantes un triángulo de referencia a diferentes distancias. Les pidió que ajustaran el tamaño de otro triángulo de acuerdo con el tamaño percibido.
Unas instrucciones (objetivas) solicitaban el ajuste del triángulo variable de forma que igualara el tamaño del triángulo de referencia.
Otras instrucciones (retinianas) pedían a los observadores imaginar que se tomaban fotografías de los dos triángulos y, por lo tanto, si un triángulo era más distante que otro, produciría una imagen más pequeña.
Los resultados mostraron que bajo instrucciones retinianas, el tamaño del triángulo variable disminuía a medida que aumentaba la distancia del triángulo de referencia. Sin embargo, bajo instrucciones objetivas tendían a exagerar la constancia del tamaño. Este fenómeno se ha denominado sobreconstancia. Bajo instrucciones objetivas la respuesta del observador está mediada por procesos cognitivos de cálculo e inferencia que llevan a sobreestimar la constancia, mientras que bajo instrucciones retinianas el juicio no está influido por factores cognitivos sino que es de naturaleza más directamente perceptiva.
La aproximación ecológica
Es conocido también con el nombre de percepción directa. Fue formulado por Gibson. Para Gibson, el planteamiento calcio del problema de la percepción tridimensional está equivocado y lleva necesariamente a un empobrecimiento del estudio de la percepción. La investigación perceptiva debe tomar en consideración el patrón total de estimulación, no la proyección geométrica de aspectos parciales del estímulo en la retina.
Gibson pensaba que la óptica geométrica no era el instrumento adecuado para describir el estímulo y las relaciones entre medio ambiente y patrón de estimulación. En su lugar, trató de crear una óptica ecológica cuyo principio fundamental es que la luz del medio ambiente transmite, no sólo energía, sino también información.
Para Gibson el concepto de información está íntimamente ligado al de estructura. La estructuración de la luz en un punto de vista concreto consiste en el conjunto de perspectivas de los objetos que el observador es capaz de captar desde ese punto de vista.
Para Gibson, el estímulo carece de ambigüedad. Toda la información está presente en la estimulación o, como Gibson prefiere llamarla, la conformación óptica. En consecuencia, no es necesario recurrir a procesos constructivos de carácter no perceptivo, tales como memoria o aprendizaje, para entender o explicar la percepción. La percepción para Gibson es directa en cuanto consiste sencillamente en captar la información disponible en la conformación óptica.
Lo único necesario es atender a la información que está en el medio ambiente.
La teoría de Gibson es ecológica en cuanto que pone el acento en la riqueza informativa de la estimulación ordinaria por oposición a la estimulación propia de las situaciones experimentales que, por lo general, restringen la información.
La teoría de Gibson es una teoría de la percepción directa porque refiere todo lo percibido a la información proporcionada por la estimulación. Evita toda referencia a procesos no perceptivos que puedan completar o interpretar un posible estímulo ambiguo.
La constancia del tamaño desde una perspectiva ecológica
Para Gibson, explicar las constancias perceptivas no es otra cosa que descubrir en la estimulación la información invariante que determina la percepción de esa constancia. No acepta ningún tipo de inferencia inconsciente o proceso mental llevado a cabo por el observador.
En el caso de la constancia del tamaño es el gradiente de densidad de textura el que proporciona la escala absoluta de distancia que va a explicar la constancia. Para Gibson, la percepción del tamaño de los objetos es una función de la cantidad de textura de una superficie que son ocultados por los objetos, proporcionan una escala efectiva de tamaños con respecto a la cual puede percibirse el tamaño de un objeto. Siempre que dos objetos oculten la misma cantidad de elementos de la textura de una superficie, se percibirán como iguales en tamaño.
Resultados experimentales
Gibson concluyó que la explicación de la constancia del tamaño no necesita complicados cálculo basados en la distancia percibida si no que es mucho más simple suponer que los observadores prestan atención a la cantidad de elementos de la textura del terreno que cada objeto cubre y que corresponde directamente a esta característica.
Aunque la explicación de la constancia del tamaño que Gibson propone, resalta un aspecto importante del problema, no parece que pueda adoptarse como una explicación general del fenómeno.
Es necesario que los objetos cuyos amaños se van a comparar se presenten sobre la textura de la misma superficie. Si no es así, no es posible establecer una comparación entre los objetos. Los elementos que componen la textura de la superficie sobre la que están situados los objetos, deben ser del mismo tamaño. Si la textura es irregular con unos elementos mayores que otros, no es posible percibir constancia del tamaño sobre la base del número de elementos que los objetos ocultan.
Posible reconciliación
Neisser propuso la existencia de tres sistemas perceptivos diferentes:
- Un sistema especialmente dedicado al control de la acción del organismo en el medio ambiente. Presenta unas características similares a las que Gibson propuso para el sistema perceptivo visual en general.
- Un segundo sistema especializado en la discriminación e identificación de objetos y situaciones familiares. Tiene unas características similares a las que los constructivistas han propuesto como propias de la percepción visual.
- Y un tercer sistema encargado de la percepción interpersonal, de las situaciones de interacción social con otros seres humanos.
Joel Norman ha propuesto recientemente que las vías visuales dorsal y ventral, corresponden a dos sistemas visuales con características similares a los postulados por Neisser, de forma que la vía dorsal formaría un sistema especializado en el control visual de la conducta motora, mientras que la vía ventral sería un sistema preferentemente dedicado al reconocimiento e identificación de los objetos. Norman ha elaborado también de forma articulada el paralelismo entre la aproximación ecológica y el funcionamiento del sistema visual dorsal, por una parte y por otra parte, el de la aproximación constructivista y el funcionamiento del sistema visual ventral.
Los sistemas visuales dorsal y ventral
Ungerleider y Mishkin presentaron evidencia empírica a favor de la existencia de dos vías funcionalmente diferenciadas en la corteza visual del mono. La vía ventral que proyectaba desde la corteza occipital hasta la corteza temporal inferior, y la vía dorsal que proyectaba también desde la corteza occipital hasta la corteza parietal posterior.
La lesión de la corteza temporal inferior izquierda del mono, le incapacitaba para discriminar entre objetos sobre la base de la forma.
La lesión de la corteza parietal posterior izquierda impedía que los animales discriminaran sobre la base de la posición.
La vía ventral era una vía dedicada a la discriminación e identificación de objetos, mientras que la vía dorsal estaba especializada en la localización de los mismos.
Ha sido frecuente llamar a las dos vías visuales la vía del “que” y la vía del “donde” para referirse a la vía ventral y a la dorsal respectivamente.
Desde la propuesta inicial de Ungerleider y Mishkin, la investigación ha obligado a reinterpretar la función de las dos vías. Para Milner y Goodale, tanto la vía ventral como la vía dorsal procesan información sobre las características de los objetos y sobre sus relaciones espaciales. Lo que diferencia a las dos vías es el uso que hacen de esa información. La vía ventral se especializa en el procesamiento de las características permanentes de los objetos y de sus relaciones, permitiendo así la formación de representaciones perceptivas a largo plazo.
La finalidad primaria del procesamiento que tiene lugar por estas vías es la acumulación de conocimiento acerca de los objetos que nos rodean.
El procesamiento que tiene lugar en la vía dorsal tiene que ver preferentemente con la información cambiante momento a momento acerca de la localización y de la disposición de los objetos con respecto a los efectores que el sujeto utiliza. Su función básica tiene que ver con el control visual on-line de las habilidades motoras.
Experimentos con ratas y monos han mostrado una clara disociación entre los dos sistemas.
Las disociaciones neuropsicológicas
Es conveniente distinguir ente dos tipos de disociaciones funcionales posibles. En el caso e la disociación simple, lo que se observa e los pacientes con un daño cerebral concreto es una deficiencia de un tipo de tarea determinada cuando su ejecución se compara con u grupo de control.
Además, para establecer la existencia de una disociación simple es necesario utilizar una tarea de control en la que el grupo de pacientes y el de control no difieran.
Los resultados probablemente mostrarán que los grupos no difieren en la tarea perceptiva pero sí en la tarea de coordinación, en la que el grupo de pacientes será inferior al grupo de control.
Las disociaciones simples nos pueden poner en la pista de una determinada asociación entre un área determinada del cerebro y una función psicológica concreta. Sin embargo, la disociación simple no puede establecer de forma clara la existencia de esa asociación.
Tiene problemas de interpretación inevitables. Uno de los más importantes radica en el supuesto de que las dos tareas son igualmente sensibles a las diferencias entre el grupo de pacientes y el grupo de control.
Los problemas interpretativos que presenta la disociación simple quedan prácticamente resueltos si se logra establecer una disociación doble. Es necesario encontrar un paciente o grupo de pacientes que presente un patrón de disociación opuesto al encontrado en el primer grupo de pacientes.
En un caso de disociación doble, la comparación de los dos grupos de pacientes añade evidencia a favor de la especificidad de la disfunción ya que en la tarea en la que el primer grupo fracasa, el otro no difiere de los controles y, al revés, donde fracasa el segundo grupo, el primero no presenta deficiencia alguna.
Percepción sin coordinación visomotora
Los pacientes con daño cerebral en la corteza parietal posterior pueden presentar problemas para dirigir visualmente acciones tales como coger un objeto o dirigir un movimiento hacia una posición determinada del espacio. Los pacientes con ataxia óptica no suelen presentar problemas para describir la posición relativa de los objetos en el espacio. Por eso, no parece que la deficiencia tenga que ver con la percepción del espacio en sí misma sin o con la interacción vasomotora.
Algunos de estos pacientes son también incapaces de girar sus manos para alcanzar un objeto o de acercar con la apertura adecuada de sus dedos cuando tratan de coger un objeto. A pesar de ello, son perfectamente capaces de describir el tamaño de esos objetos o su orientación.
Estos síntomas también muestran que el problema no está exclusivamente ligado al espacio sino que afecta a otras características de los objetos como son su tamaño, forma y orientación.
Los problemas de coordinación, que pueden presentar los pacientes con daño cerebral posterior, también presentan un alto grado de disociación entre sí.
En general, los mecanismos de control motor están altamente especializados.
Coordinación vasomotora sin percepción
DF es una mujer que sufrió un daño cerebral irreversible como consecuencia de un envenenamiento de CO. DF era incapaz de reconocer las caras de sus familiares y amigos, y tampoco podía reconocer la forma de objetos familiares. Al mismo tiempo, no tenía problemas para reconocer a las personas por la voz o los objetos mediante el tacto. Su problema era exclusivamente visual.
El diagnóstico de agnosia perceptiva visual. No es capaz de dibujar un objeto que se le presenta visualmente pero puede hacerlo si se le pide que lo dibuje de memoria. Que no se trata de un problema sensorial, lo demuestra el hecho de que DF puede discriminar colores.
Una característica básica que DF ha perdido es la capacidad para detectar la orientación de los objetos. Ante una prueba de discriminación de enrejados no es capaz de diferenciar su orientación aunque sí es capaz de discriminar su frecuencia espacial.
El problema con la orientación no parece tener su origen en la corteza visual primaria porque todas las pruebas que se le han hecho mediante el uso de potenciales corticales muestran que el procesamiento en esta área permanece intacto.
El daño cerebral que padecía era bastante difuso, característica bastante frecuente en casos de anoxia. Las zonas ventrolaterales de la corteza occipital estaban particularmente afectadas mientras que la corteza visual primaria estaba bien preservada. El problema fundamental del DF es de naturaleza perceptiva y está preferentemente relacionado con la percepción de la forma. A pesar de que es capaz de procesar la luminancia y el color, no es capaz de percibir formas cuyos contornos estén definidos por diferencias en luminancia o en color.
A pesar de su profunda deficiencia en la visión de la forma, es capaz de utilizar la información basada en el tamaño, la forma y la orientación de los objetos para controlar una amplia gama de movimientos guiados visualmente.
Puede alcanzar y agarrar con gran precisión un objeto situado delante de ella, a pesar de que poco antes era incapaz de identificar ese objeto.
DF puede utilizar información para controlar su comportamiento a pesar de que no es capaz de discriminar o identificar esa información cuando se le pide que la describa.
DF, cuyas lesiones se centran en la zona ventrolateral de la corteza occipital, muestra claros problemas perceptivos mientras que su capacidad para utilizar la información visual para controlar sus acciones permanece intacta. En el caso contrario, las personas con ataxia óptica.
No muestran problemas perceptivos cuando tienen que describir los objetos que se les presentan, pero tienen graves problemas para actuar sobre esos objetos guiados por la información que parecen percibir.
La propuesta de Norman
Características de los dos sistemas
Norman ha enumerado una serie de características que permiten contrastar las diferencias de los dos sistemas perceptivos:
a) Función. Mientras el sistema ventral analiza la información para reconocer e identificar los estímulos, el sistema dorsal lo hace para guiar visualmente el comportamiento del organismo.
b) Sensibilidad. El sistema ventral es más sensible a las frecuencias espaciales altas, mientras que el sistema dorsal lo es a las frecuencias temporales altas. El sistema ventral está más preparado para procesar de los detalles de una escena mientras que el dorsal es más sensible a los aspectos globales que proporcionan las frecuencias espaciales bajas. El sistema dorsal es mejor a la hora de percibir el movimiento.
c) Memoria. El sistema ventral puede llevar a cabo el reconocimiento y la identificación de los objetos y de los acontecimientos. El sistema dorsal necesita una memoria de corta duración que permita la integración de la información on- line.
d) Velocidad. El sistema dorsal es más rápido. Este hecho es debido a que este sistema recibe preferentemente proyecciones del sistema magnocelular, mientras que el sistema ventral recibe preferentemente proyecciones parvocelulares que son de conducción más lenta.
e) Consciencia. El sistema ventral está más directamente relacionado con la toma de consciencia de la información que el sistema dorsal. El sistema dorsal puede funcionar con bastante precisión de forma inconsciente.
f) Marco de referencia y métrica. Para reconocer e identificar objetos el sistema ventral necesita un marco de referencia alocéntrico. Este sistema necesita alcanzar una representación del objeto centrada en el objeto mismo. Sin embargo, para interactuar con el objeto necesitamos marcos de referencia centrados en el sujeto. El sistema visual dorsal necesita marcos de referencia egocéntricos. El sistema dorsal necesita tener información sobre la distancia absoluta a la que se encuentran los objetos, mientras que al sistema ventral le es suficiente con tener información relativa de las posiciones de los objetos.
g) Input. el sistema ventral está especializado en la visión central controlada por la fóvea, mientras que el sistema dorsal lo está para la visión periférica. Mientras que el sistema dorsal sufre considerablemente cuando se ve obligado a trabajar exclusivamente con claves monoculares, el sistema ventral no se ve tan disminuido por este hecho.
En las personas en las que la visión funciona normalmente, estos dos sistemas actúan de forma integrada e intercambian continuamente la información entre sí.
Relación entre los dos sistemas y las teorías perceptivas
La propuesta de Joel Norman es una teoría completa de la percepción visual que necesita una aproximación dual que incorpore las características diferenciales tanto del sistema ventral como del sistema dorsal.
La propuesta de Norman proporciona un posible marco de unificación de teorías fuertes pero aparentemente irreconciliables.
Las claves de profundidad
Para Norman, tanto el sistema ventral como el dorsal son capaces de procesar la estructura tridimensional del espacio. Sin embargo, mientras que el sistema ventral lo hace preferentemente a través de claves monoculares de naturaleza pictórica, el sistema dorsal lo realiza a través de la captación de invariantes y la utilización de claves binoculares tales como la estereoscopia.
Norman ha propuesto que se reserve el término clave para clasificar a los indicadores utilizados por el sistema ventral y que se utilice el término invariante para clasificar a los utilizados por el sistema dorsal. Las principales diferencias entre las claves e invariantes son:
- Son procesadas por distintos centros cerebrales.
- La extracción de información invariante está incorporada en la configuración física del sistema dorsal, mientras que las claves son de carácter algorítmico.
- Los invariantes son extraídos directamente, las claves sirven de base a procesos de inferencia más o menos consciente.
- Los invariantes son probablemente innatos mientras que las claves son probablemente aprendidas.
Norman aduce a numerosas observaciones como el caso DF. Al parecer, para el control de las acciones que estos pacientes llevan a cabo sin problema alguno, es crucial la utilización de invariantes binoculares, tales como la estereoscopia, y de invariantes de movimiento. Su propuesta también se apoya en experimentos realizados con personas entre las respuestas que los observadores dan a una misma estimulación, dependiendo del sistema utilizado para responder.
La percepción del tamaño
Los factores que determinan la percepción del tamaño pueden ser diferentes según intervenga en su percepción el sistema ventral o el dorsal.